|
|
摘要:种苗移植机是设施园艺种苗生产提高生产效率、降低劳动力成本、提高企业效率的智能化装备,而移植机械手是种苗移植机的关键部件。针对不同的种植方法与种植对象,移植手的形式与规格都有很大的差别。为此,针对花卉穴盘种苗提出了一种单驱动四齿移植手,结构简单,作业可靠,有较大的适应性。针对设计出的移植机械手,进行穴盘花卉种苗移植性能试验,结果表明:在50mm行程笔形气缸驱动下,采用泥炭配合珍珠岩基质培育种苗,当土壤含水量为60%、手指钢齿倾斜角为5°、手指钢齿直径为2mm时,移植成功率平均可达93%,伤苗率小于0.5%。
关键词:设施农业;穴盘苗;移植机械手;单驱动;
引言
移栽作业是育苗生产系统运作过程之一,目的是为了保证幼苗有足够的生长空间,把幼苗从高密度的穴盘移栽到低密度的穴盘或花盆中,以保证秧苗的进一步生长[1,2]。移栽作业一般都是在温室中进行,而温室内温度高、湿度大,作业环境比较恶劣,且劳动强度大。用机械化、自动化等先进生产手段提高移栽作业的自动化程度,是扩大温室栽培规模、提高生产效率的有效解决办法[3,4,5]。
移植机械手作为移植机的关键部件,国内很多高校及研究机构,如沈阳农业大学[6]、南京农业大学[7]、华南农业大学[8,9,10],浙江大学[11]、中国农业大学[12]、江苏大学[13,14]、吉林大学[15]、北京工业大学[16]及北京农业智能装备技术研究中心[17],对穴盘种苗移植机械手都进行了不同程度的研究。
笔者针对穴盘花卉种苗,设计了一种结构简单、作业可靠的单驱动四齿移植机械手,同时进行了性能试验。
1设计方案
本文设计的穴盘苗移植手的基本作业技术要求如下:①能够快速、准确地取苗、运苗和移栽幼苗,要求执行机构具有精度高、动作快、承载能力强及足够的工作空间。②手指具有一定的开闭范围且应具有适当的夹紧力。手指的开闭范围即从张开到闭合绕支点转过的角度,角度越小,越不利于夹持。另外,虽然幼苗和基质的质量很小,但如果夹持力小仍会导致取苗失败,所以应保证手指具有一定得夹持力,以使基质不会在运行过程中脱落。③具有一定的通用性。末端执行器一般都是专门设计的,为了使其具有一定的通用性,应考虑其结构具有一定的可调性,以利于针对不同的作物进行移栽作业。末端执行器工作流程图如图1所示。
图1末端执行器工作流程图
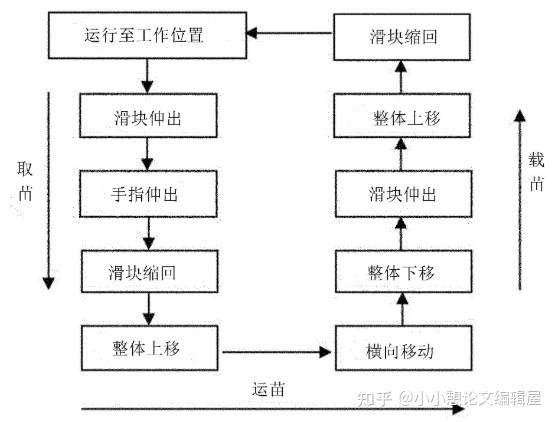
1)取苗过程。
取苗包括手指的伸出、手指钢齿向内侧夹持和整体上移运动,气缸伸出推动手指钢齿插入基质,之后气缸缩回,4个手指钢齿向内夹持,然后机械手整体上移完成取苗动作。
2)运苗过程。
运苗即移植机械手实现横向移动,由水平运动步进电机驱动,运动过程中应尽量保证幼苗的平稳运输。
3)栽苗过程。
栽苗与取苗的动作正好相反,首先移植机械手整体下移,当幼苗进入穴孔时气缸缩回,手指钢齿打开,然后整体上移,完成移植。
根据以上作业流程,设计出如图2所示移植机械手,主要由笔形驱动气缸、手指钢齿、手指钢齿导向板、机械手L型固定板及钢齿固定座构成。
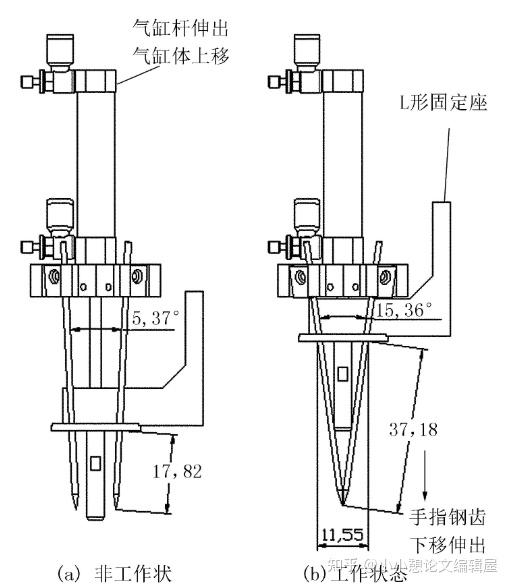
该移植机械手在笔形气缸驱动下进行对幼苗基质的夹持动作,如图3所示。其中,图3(a)笔形气缸杆伸出,手指钢齿相对于移植手L形固定座为缩回状态,移植手处于非工作状态;当如图3(b)所示笔形气缸杆伸出后,手指钢齿相对于移植手L形固定座伸出,移植手处于工作状态,可完成对秧苗基质的夹持作业。
图2移植机械手主体结构
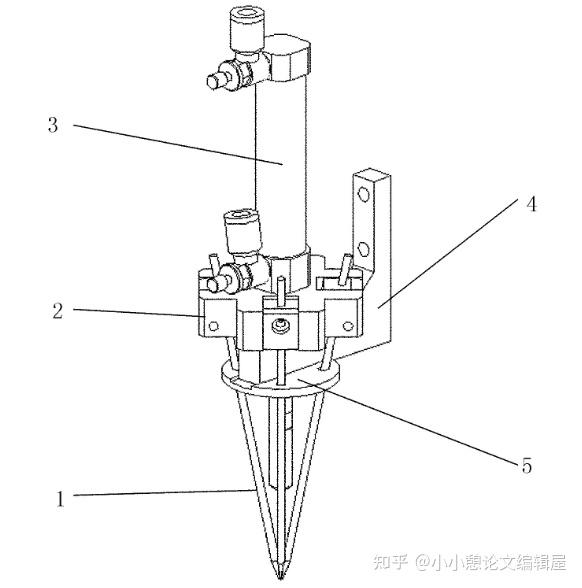
1.手指钢齿2.钢齿固定座3.笔形气缸4.移植手L形固定座5.钢齿导向板
图3移植机械手工作原理
2移植作业性能试验
2.1材料与试验条件
试验前,调节移植机械手气缸气压为0.3MPa,准备10mm×20mm标准穴盘和苗钵。
2.2试验指标与评价方法
试验把土壤含水量、钢尺倾角和钢尺直径作为主要影响因素,测定这3个因素对幼苗的抓取影响的显着程度,通过理论分析和仿真,得到土壤含水量、钢尺倾角和钢尺直径对移植机械手移植成功率和伤苗率的影响。每个因素选取3个水平记性正交试验,因素水平表如表1所示。
表1试验因素水平表

2.3试验方法
由于单一的试验指标不能得到理想的试验结果,因此采用双指标分析。在多指标正交试验中,各指标的最佳试验方案之间存在一定的矛盾,在评价试验结果时需要兼顾两个指标,从而找出使得每个评价指标都尽可能好的试验方案。本试验分析采用综合评分法进行评价,共2个指标,即移植成功率和伤苗率。移植成功率越高越好,设置加权系数为4;伤苗率越低越好,设置加权系数为1.5。
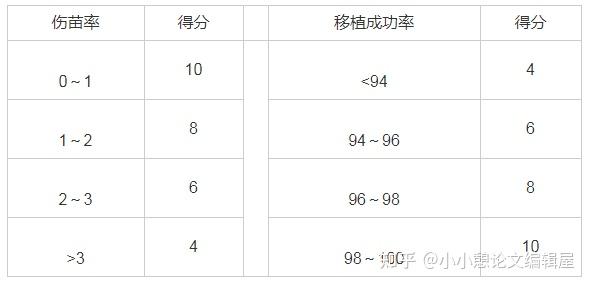
2.4试验评分标准
评分公式为:综合评分=1.5×伤苗率+4×移植成功率。试验评分标准如表2所示。
表2测试分数标准
2.5试验结果
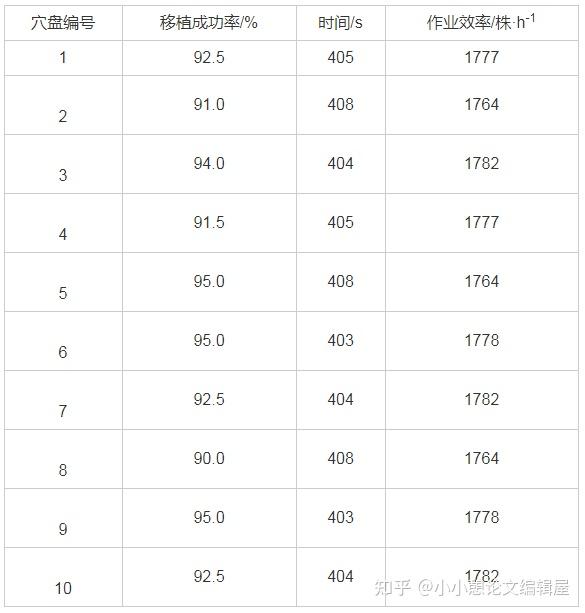
通过极差分析得到最优水平组合:当土壤含水量为60%、手指钢齿倾斜角为5°、手指钢齿直径为2mm时,综合效果最佳。在此组合下进行移植树验证试验(见图4),结果如表3所示。由表3可知:移植机械手的移植成功率平均达到93%,伤苗率小于0.5%。另外,穴盘种苗的长势也对移植成功率有影响,有待今后对此方面进行进一步的试验研究。
移植机械手的作业试验如图4所示。
图4移植机械手样机
3结论
1)设计了一种移植机械手。对钢尺角度、伸出长度等参数进行了设计,确定了最佳角度为85°。
2)针对移植机械手进行了性能试验,对气缸压力进行了单因素试验,得到最佳汽缸压力分别为0.35 MPa。参数优化和正交试验结果表明:在最优水平组合时,移植机械手抓取幼苗质量最佳,移植成功率高于90%,伤苗率低低于0.5%。
参考文献
[1]辜松.设施园艺现代生产装备与技术[M].北京:中国农业出版社,2015:1-2.
[2]刘炜,刘继展.穴盘苗移栽机器人末端执行器综述[J].农机化研究,2013,35(7):6-10.
[3]岳建魁,郭俊先,梁佳,等.国内外移栽机械发展现状[J].新疆农机化,2016(5):30-32.
[4]齐飞,周新群,张跃峰,等.世界现代化温室装备技术发展及对中国的启示[J].农业工程学报,2008,24(10):279-285.
[5]辜松,杨艳丽,张跃峰.荷兰温室盆花自动化生产装备系统的发展现状[J].农业工程学报,2012,28(19):1-8.
[6]张诗,田素博,邱立春.穴盘苗自动移栽机械手的结构设计与仿真[J].沈阳农业大学学报,2007,38(3):437-439.
[7]孙国祥,汪小旵,何国敏,等.穴盘苗移栽机末端执行器设计与虚拟样机分析[J].农业机械学报,2010,41(10):48-53.
[8]刘凯,辜松.PLC在穴盘苗移栽机器人控制系统中的应用[J].农机化研究,2009,39(12):179-181.
[9]刘凯.2YZ-2000型秧苗移栽机关键部件的开发研究[C]//中国农业工程学会2011年学术年会论文集.重庆:西南大学出版社,2011:22-25.
[10]黎波,辜松,初麒,等.椰糠培育叶菜种苗移植机械手设计与试验[J].农业工程学报,2017,33(14):18-24. |
|


 发表于 2023-1-8 11:35:27
发表于 2023-1-8 11:35:27